品牌
其他厂商性质
所在地

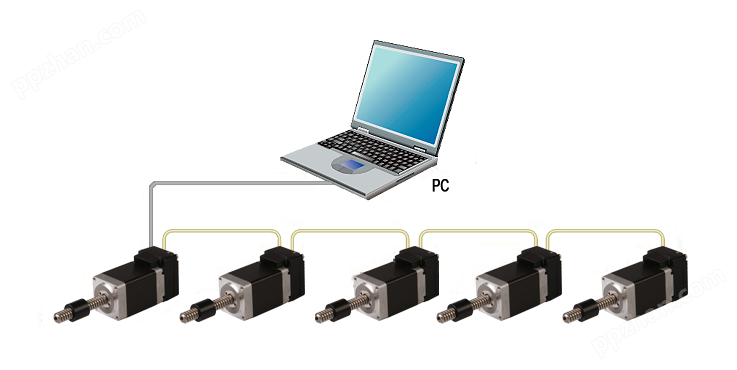
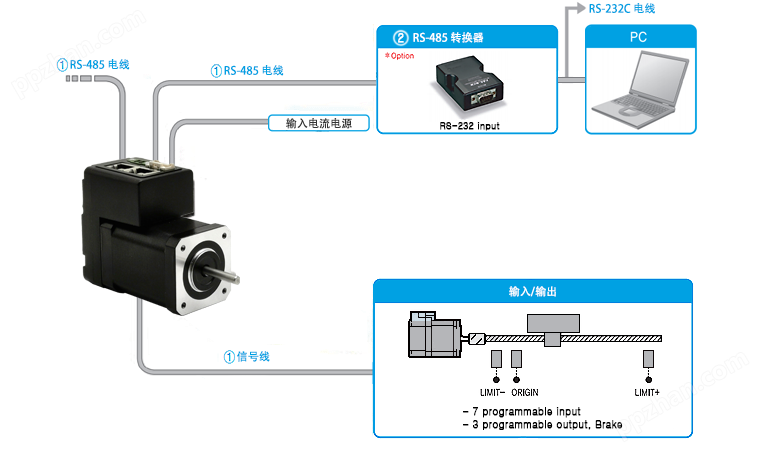
集成式一体闭环步进电机,在电机端部集成驱动和控制系统,附带高分辨编码器(16000 PPR),每50㎲实时更新电机位置,集成运动控制通过RS485通讯到电脑同时连接16轴,所有的运动指令集都是通过集成的 Network 并由保存在 FlashRom 中的一个参数执行的,运动库(DDL)提供了64位Windows 2000/XP下的编程, 可以保存在Flash ROM中。
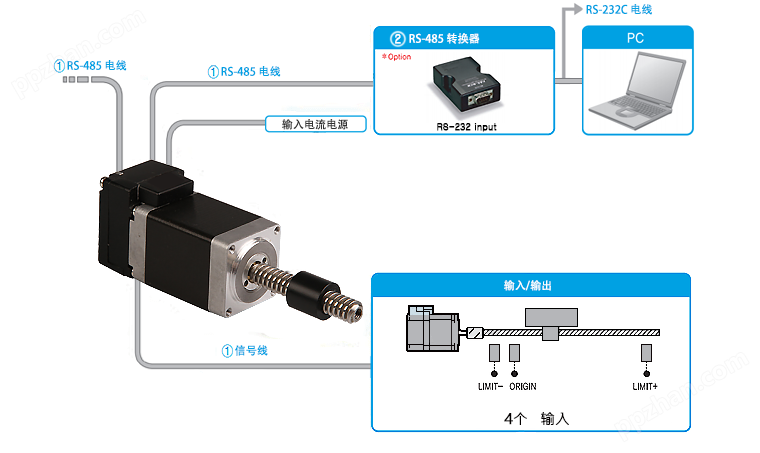
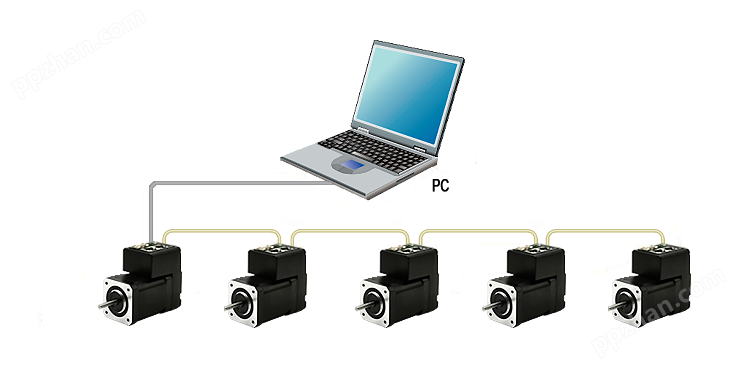
1. 基于网络运动控制 - 可通过RS-485与PC进行直连,所有的运动参数均存储在Flash ROM中,可连接16轴。
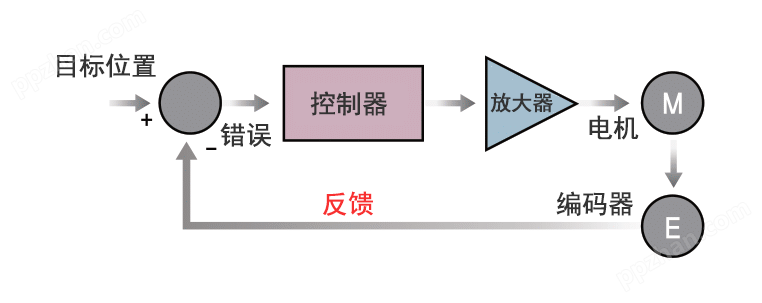
2. 闭环控制系统 - 使用一体式高分辨率的编码器(16000 PPR),每50㎲实时更新位置。
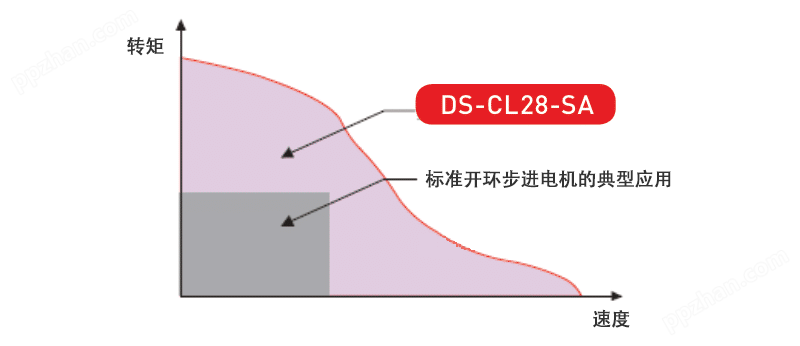
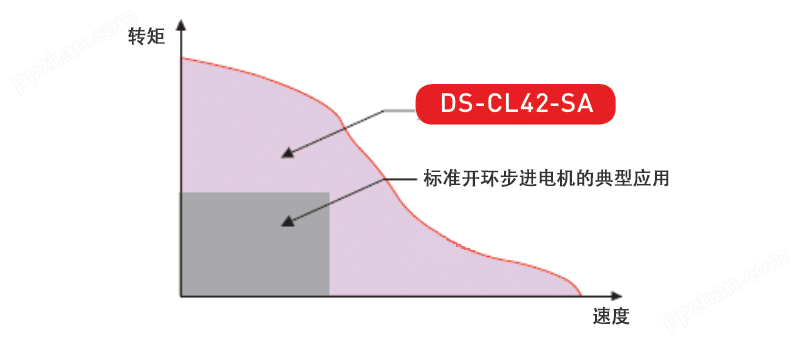
3. 高力矩、高转速 - 与普通电机相比,保持高转矩、高转速状态,使电机运行在99%工作状态而不失步。
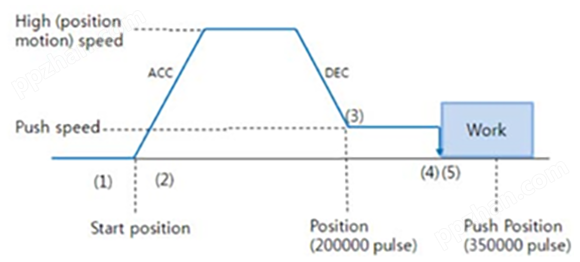
4. 自闭环力矩控制,替代外部压力传感器,通过调节电流,实现回原点、下压力矩控制
In a environment, you can move left and right to see the contents (tables).
| 参数 | |
|---|---|
| 功能 | 描述 |
| 输入电压 | 24VDC±10% |
| 控制方式 | 32位ARM闭环控制 |
| 多轴驱动 | Max. 16轴 链式连接 |
| 位置表 | 256运动指令步数(连续、循环、跳转等等) |
| 电流功耗 | 500mA(不包含电机电流) |
| 环境温度 | 使用:0~55°C 存储:-20~70°C |
| 环境湿度 | 使用:35~86%RH 存储:10~90% RH |
| 抗震 | 0.5G |
| 转速 | 0~3000rpm |
| 编码器分辨率 | 值16000PPR |
| 报警功能 | 十余种报警功能,详细内容见使用说明 |
| 旋转方向 | CW:正转/CCW:翻转(可选择) |
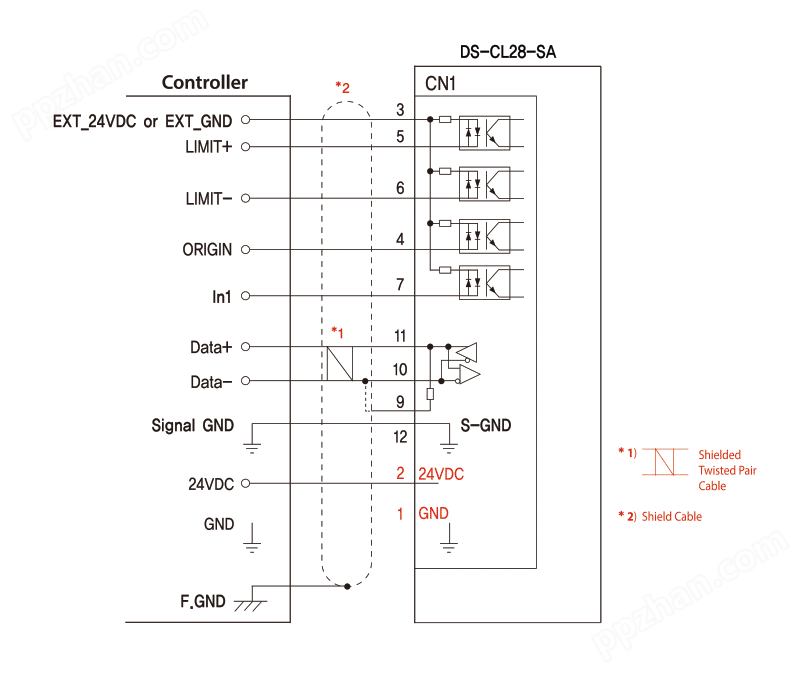
| 数字信号输入 | 4个 输入 |
| 数字信号输出 | 不支持此功能 |
| 通讯协议 | RS-485串行通讯 通讯速率 115200bps |
| 位置控制 | 增量模式 / 模式 数据范围:-2147493648~2147483647(pulse) 脉冲速度:Max 800kpps |
| 回原点 | 原点传感器、±Limit 传感器、Z相、扭矩 |
| 图形用户界面 | Windows 用户使用界面 |
| 软件 | Ezi-Motion (GUI) / Windows 2000/xp/7/8/10 运动函数库(DLL) |
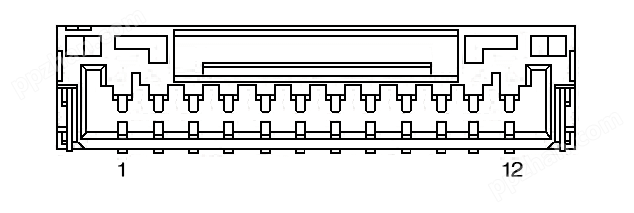
In a environment, you can move left and right to see the contents (tables).
| 电源通讯输入/输出信号连接器 | ||
|---|---|---|
| 端口 | 功能 | 描述 |
| 1 | GND | 电源地 |
| 2 | +24V | +24V 电源输入 |
| 3 | I/O Common | 输入 / 输出公共端 |
| 4 | IN1 | 用户输入1 |
| 5 | IN2 | 用户输入2 |
| 6 | IN3/td> | 用户输入3 |
| 7 | IN4 | 用户输入4 |
| 9 | Reserved | 保留 |
| 10 | Data - (B) | 通讯信号 |
| 11 | Data + (A) | 通讯信号 |
| 12 | S-GND | 通讯信号地 |
In a environment, you can move left and right to see the contents (tables).
| 可选配件 | |
|---|---|
| FAS-RCR(RS-232C转RS-485转换器) | |
| 项目 | 规格 |
| 通讯 速度 | 值1152Kbps |
| 通讯 距离 | RS-232:Max15m RS-485: Max1.2km |
| 连接 | RS-232C : DB9 RS-485 : RJ-45 |
| 尺寸 | 50x75x23mm |
| 重量 | 38g |
| 供电 | RS-232C供电 5~24VDC 外部电源获得 |
注意:配件需另行购买
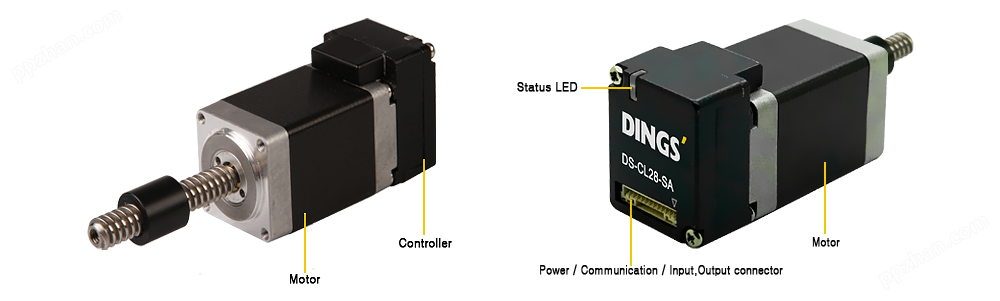
在DS-CL28-SA系列产品中,LED状态指示灯可以通过LED的通断闪烁颜色来判断实际使用状态。
In a environment, you can move left and right to see the contents (tables).
| 状态 | 功能 | 开/关状态 |
|---|---|---|
| 禁用 | 绿色 : 红色 : | 绿灯闪烁,红灯不亮 |
| 使能 | 绿色 : 红色 : | 绿灯闪烁,红灯不亮 |
| 使能与通讯 | 绿色 : 红色 : | 绿灯常亮,红灯常亮 |
| 运行中 | 绿色 : 红色 : | 绿灯和红灯常亮 |
| 位置偏差 | 绿色 : 红色 : | 绿灯和红灯交替闪烁 |
| 报警 | 绿色 : 红色 : | 红灯周期性多次闪烁 |
In a environment, you can move left and right to see the contents (tables).
| 次数 | 保护 | 条件 |
|---|---|---|
| 1 | 过电流 | 电源设备超过了额定值 |
| 2 | 超速 | 电机转速高于3000rpm |
| 3 | 设置输出错误 | 电机停止时,位置值高与设定值 |
| 4 | 过载 | 电机在超过扭矩状态下连续运行5s |
| 5 | 过热 | 内部温度超过85℃ |
| 6 | 反电动势过大 | 反电动势高于值 |
| 7 | 电机链接错误 | 上电状态下,电机连接到驱动器错误 |
| 8 | 编码器连接错误 | 编码器与驱动器连接错误 |
| 9 | 低压错误 | 驱动器电源电压过低 |
| 10 | 定位错误 | 操作后,发生位置报错 |
| 11 | ROM错误 | 参数存储设备ROM错误 |
| 12 | 位置追随错误 | 马达停止时位置位置误差超过90℃ |

集成式一体闭环步进电机,在电机端部集成驱动和控制系统,附带高分辨编码器,每50㎲实时更新电机位置,集成运动控制通过RS485通讯到电脑同时连接16轴,所有的运动指令集都是通过保存在Flash ROM中的参数执行的,运动库(DDL)提供了64位Windows 2000/XP下的编程, 可以保存在Flash ROM中。
1. 基于网络运动控制 - 可通过RS-485与PC进行直连,所有的运动参数均存储在Flash ROM中,可连接16轴。
2. 闭环控制系统 - 使用一体式高分辨率的编码器(16000 PPR),每50μs实时更新位置。
3. 高力矩、高转速 - 与普通电机相比,保持高转矩、高转速状态,使电机运行在99%工作状态而不失步。
4. 闭环力矩控制,替代外部压力传感器,通过调节电流,实现回原点、力矩控制
In a environment, you can move left and right to see the contents (tables).
| 参数 | |
|---|---|
| 输入电压 | 24VDC±10% |
| 控制方式 | 32位 ARM闭环控制 |
| 多轴驱动 | 可连接16轴 |
| 位置表 | 256运动指令步数(连续、循环、跳转等等) |
| 电流功耗 | 500mA(不包含电机电流) |
| 环境温度 | 使用:0~55°C 存储:-20~70°C |
| 环境湿度 | 使用:35~86% RH 存储:10~90% RH |
| 抗震 | 0.5G |
| 转速 | 0~3000rpm |
| 编码器分辨率 | 值16000PPR |
| 报警功能 | 十余种报警功能,详细内容见使用说明 |
| 旋转方向 | CW:正转/CCW:翻转(可选择) |
| 数字信号输入 | 4个可编程输入(光耦) |
| 数字信号输出 | 不支持 |
| 通讯协议 | RS-485串行通讯 传输速度:115200(bps) |
| 位置控制 | 增量模式 数据范围:-2147493648 ~ +2147483647 (脉冲) 脉冲速度:800(kpps) |
| 回原点 | 原点传感器、±Limit 传感器、Z相 |
| 图形用户界面 | Windows 用户使用界面 |
| 软件 | Ezi-Motion GUI / Motion library (DLL) for Windows 2000/XP/7/8/10 |
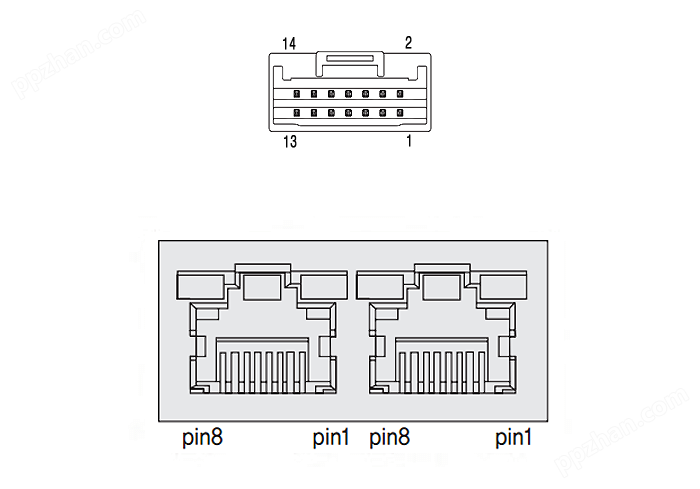
In a environment, you can move left and right to see the contents (tables).
| 电源通讯输入/输出信号连接器 | ||
|---|---|---|
| 号码 | 功能 | 说明 |
| 1 | 输入公共 | 输入公共端 |
| 2 | 输出公共 | 输出公共端 |
| 3 | 断电刹车- | 断电刹车 +24V |
| 4 | 断电刹车+ | 断电刹车 通讯信号地 |
| 5 | IN1 | 用户输入1 |
| 6 | IN2 | 用户输入2 |
| 7 | IN3 | 用户输入3 |
| 8 | IN4 | 用户输入4 |
| 9 | IN5 | 用户输入5 |
| 10 | IN6 | 用户输入6 |
| 11 | OUT1 | 用户输出1 |
| 12 | OUT2 | 用户输出2 |
| 13 | IN7 | 用户输入7 |
| 14 | OUT3 | 用户输出3 |

In a environment, you can move left and right to see the contents (tables).
| 号码 | 功能 | I/O |
|---|---|---|
| 1 | 24VDC | Input |
| 2 | GND | Input |
In a environment, you can move left and right to see the contents (tables).
| 号码 | 功能 | I/O | 功能 |
|---|---|---|---|
| 1 | GND | 5 | GND |
| 2 | GND | 6 | Data- |
| 3 | Data+ | 7 | GND |
| 4 | GND | 8 | GND |
In a environment, you can move left and right to see the contents (tables).
| 可选配件 | |
|---|---|
| FAS-RCR(RS-232C转RS-485转换器) | |
| 项目 | 规格 |
| 通讯速度 | 值1152Kbps |
| 通讯距离 | RS-232C : Max 15m RS-485 : Max 1.2km |
| 连接 | RS-232C : DB9 RS-485 : RJ-45 |
| 尺寸 | 50x75x23mm |
| 重量 | 38g |
| 供电 | RS-232C供电(可供5~24VDC外部电源) |
注意:配件需另行购买

对于DS-CL42-SA系列产品,可通过LED彩色灯的开/关和闪烁来检查LED的状态。
In a environment, you can move left and right to see the contents (tables).
| 状态 | 功能 | 开/关状态 |
|---|---|---|
| 禁用 | 绿色 : 红色 : | 绿灯闪烁,红灯不亮 |
| 使能 | 绿色 : 红色 : | 绿灯闪烁,红灯不亮 |
| 使能与通讯 | 绿色 : 红色 : | 绿灯常亮,红灯常亮 |
| 运行中 | 绿色 : 红色 : | 绿灯和红灯常亮 |
| 位置偏差 | 绿色 : 红色 : | 绿灯和红灯交替闪烁 |
| 报警 | 绿色 : 红色 : | 红灯周期性多次闪烁 |
In a environment, you can move left and right to see the contents (tables).
| 次数 | 保护 | 条件 |
|---|---|---|
| 1 | 过电流 | 电源设备超过了额定值 |
| 2 | 超速 | 电机转速高于3000rpm |
| 3 | 设置输出错误 | 电机停止时,位置值高与设定值 |
| 4 | 过载 | 电机在超过扭矩状态下连续运行5s |
| 5 | 过热 | 内部温度超过85℃ |
| 6 | 反电动势过大 | 反电动势高于值 |
| 7 | 电机链接错误 | 上电状态下,电机连接到驱动器错误 |
| 8 | 编码器连接错误 | 编码器与驱动器连接错误 |
| 9 | 低压错误 | 驱动器电源电压过低 |
| 10 | 定位错误 | 操作后,发生位置报错 |
| 12 | ROM错误 | 参数存储设备ROM错误 |
| 15 | 位置追随错误 | 马达停止时位置位置误差超过90℃ |
In a environment, you can move left and right to see the contents (tables).
| 产品 系统 | |||||
|---|---|---|---|---|---|
| 1 | V - 向量系列 | ||||
| 2 | 驱动器选项 | □ D - 驱动器 | □ P - 可编程控制器和驱动器 | ||
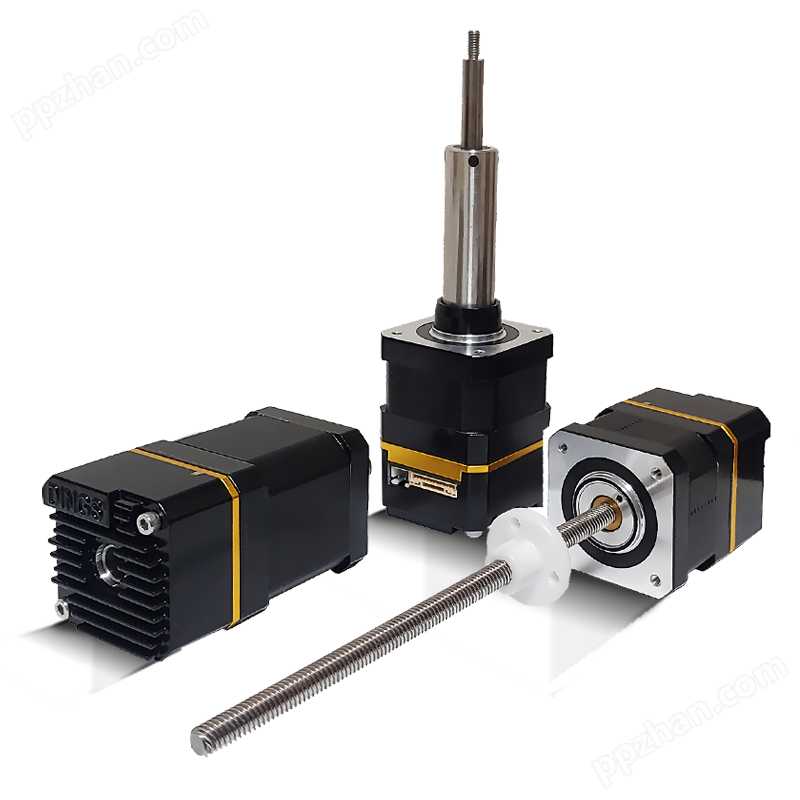
| 3 | 线性版本 | □ E - External | □ N - Non-captive | □ K - Captive | □ C - Electric Cylinder |
| 4 | 电机长度 (详见速度/推力曲线) | □ 1 - 单叠 | □ 2 - 双叠 | ||
| 5 | 丝杆代码 | 详见该网页上的丝杆代码选型 | |||
| 6 | 丝杆长度/行程 | □ XXX = XXXmm 丝杆长度 [外部驱动式/贯通轴式电机] | □ XXX = X.XX 英制行程 [C型固定轴式气缸式/K型固定轴电机] | ||
| 7 | 丝杆表面处理 | □ S - 无涂层 | □ T - 特氟龙涂层 | ||
| 8 | 末端加工 | □ M - 公制 | □ U - 英制 | □ S - 光轴 | □ N - None |
| 9 | 螺母类型 | □ S - 标准法兰螺母 | □ A - 消隙螺母 | ||
注意:螺杆不得承受径向负载
In a environment, you can move left and right to see the contents (tables).
| 产品 系统 | ||
|---|---|---|
| 1 | V | 向量系列 |
| 2 | P | 带驱动程序的可编程控制器 |
| 3 | 23 | NEMA尺寸 |
| 4 | H | 转子版本 |
| 5 | Motor Selection: (See Speed/Torque Curves) | -45 - 0.8 Nm 电机转矩 -55 - 1.2 Nm 电机转矩 -75 - 2.0 Nm 电机转矩 |
| 6 | -GR | 预留齿轮箱 |
| 7 | -PG10 | 行星齿轮箱(减速比10:1) |
| 8 | -XYZ | 定制后缀 |
例如
VP23H-45
VP23H-55-GR
VP23H-75-PG10
CP23H-45-XXX-001 - 定制后缀
In a environment, you can move left and right to see the contents (tables).
| 驱动器型号 | DS-OL42-IPD/DS-OL42-IRS4 | |
|---|---|---|
| 适配电机 | 适配两相混合式步进电机,适配3.0A(峰值) | |
| 驱动电源供电 | DC 24V~36V | |
| 输出电流 | 0.5A~3.0A/相(峰值) | |
| 驱动方式 | 全桥双极性PWM驱动 | |
| 设备初始化时间 | 2s | |
| 输入信号 | 2路高速输入信号*1 | 光耦输入电压:H = 3.5 - 26V , L = 0 - 0.8V 导通电流5~8mA |
| 2路通用输入信号*2 | 光耦输入电压:H = 5V , L = 0 - 0.8V 导通电流5~8mA | |
| 输出信号 | 1路通用输出信号 | 光电隔离输出,承受电压30VDC,饱和电流10mA |
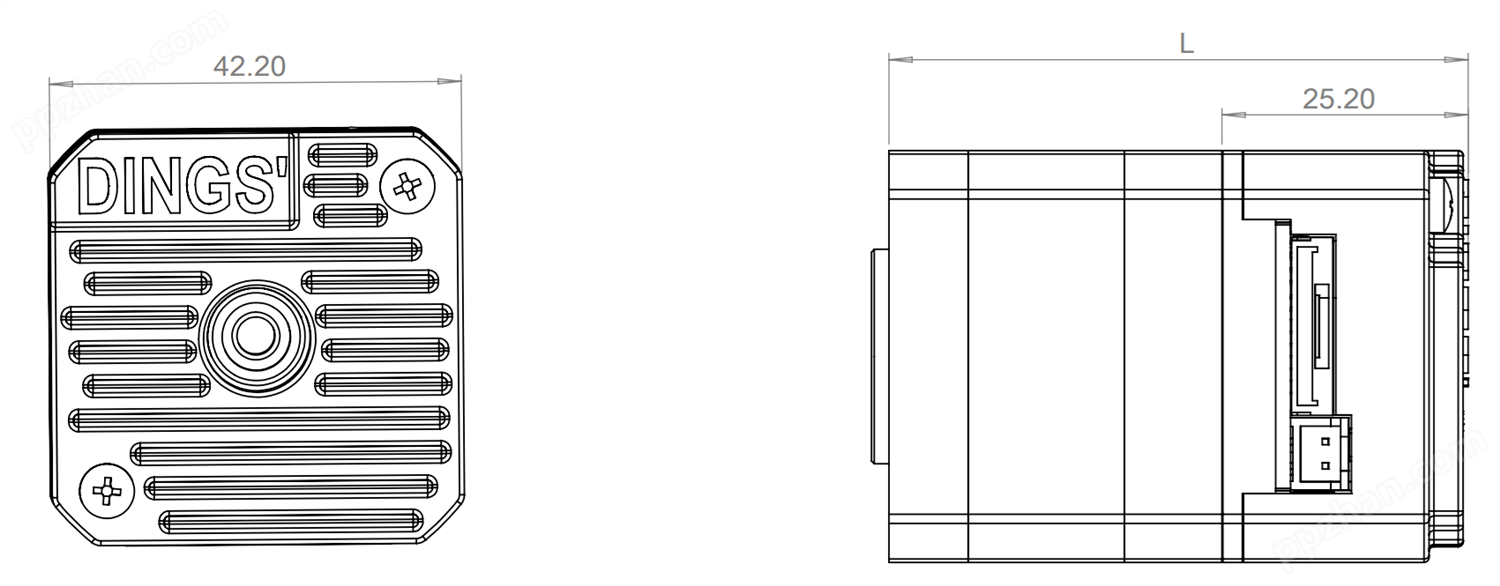
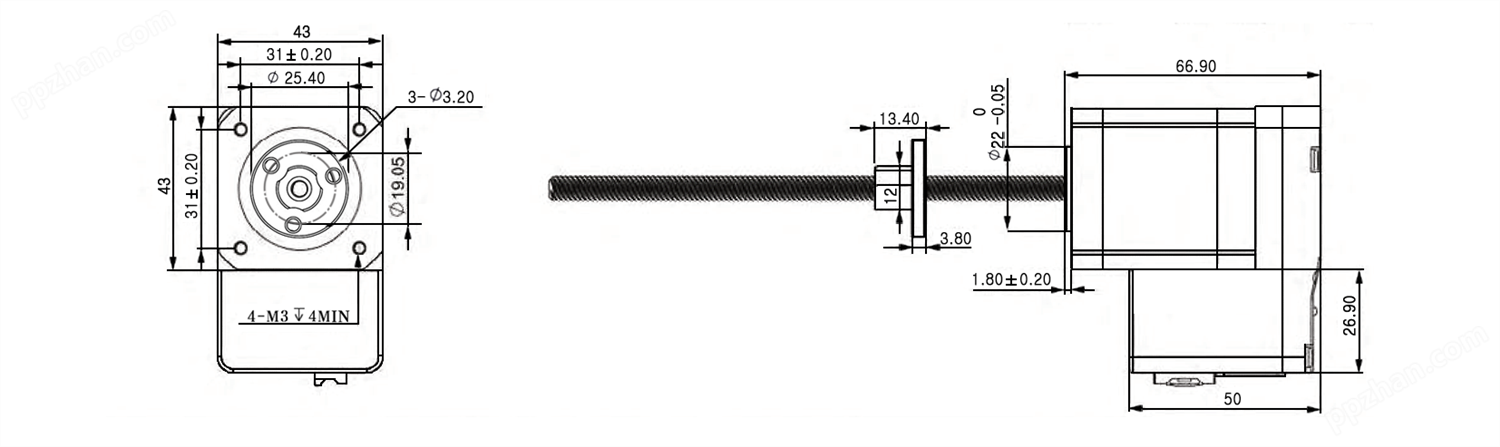
| 尺寸 | 42.2 x 42.2 x 25.2mm | |
| 重量 | 60g | |
| 使用环境 | 使用场合 | 避免粉尘,油雾及腐蚀性气体 |
| 湿度 | < 85="" %="" rh,=""> | |
| 温度*3 | 0°C - +40°C | |
| 散热*4 | 安装在通风环境中 | |
*1 当控制模式为外部模式时,端口IN1 IN2为高速脉冲口
*2 IN3 IN4输入电压为5V,当IN1 IN2输入电压与IN3 IN4输入电压不同时,请勿将PIN5端口与IN1 IN2共地
*3 由于驱动与电机一体连接,实际使用中电机温度会传导给驱动,我们建议实际应用中,电机稳定工况下的温度不应高于55℃,过高的温度,可能会导致驱动芯片的损坏
*4 在温度较高的环境中,建议外部增加散热装置