
关节机器人,也称关节手臂机器人或关节机械手臂,是当今工业领域中见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。
比如,自动装配、喷漆、搬运、焊接等工作,按照构造它有不同的分类。 二、机器人码垛设备总览
码垛工作站由ER180码垛机器人系统1套、机器人抓具1套、机器人底座1套、托盘定位装置4套、安全围栏装置1套。
在每个托盘出入口位置设置安全防护门,安全门上配置安全门锁,保护人员安全。
图1 码垛工作站效果图
1.实施条件
动力电源:交流380V±10%, 50Hz±2%,三相五线制;
压缩空气:0.4--0.6Mpa,干燥、洁净、无冷凝;
环境温度:-10-- +45℃
环境湿度:45--95%RH,无冷凝;
2.码垛设备功能
(1) 采用ER180码垛机器人,机器人工作范围3.2m,负载180kg,可同时对2-4个垛位进行码垛。
(2) 适用托盘尺寸L1500×W1500×150mm,满垛层高2000mm。
(3) 机器人负责码4个不同产品,使用夹板式抓具,抓具开合行程500mm,可适用不同规格纸箱,抓取过程稳定可靠。
(4) 机器人抓取纸箱至托盘码垛一个工作循环时间不超过10秒。
(5) 机器人系统预留与客户方MES系统通信接口。 (6) 托盘定位功能:托盘放置于地面上,并设置托盘定位装置,确保托盘每次放置位置一致。
(7) 安全防护措施:在机器人工作区域外围设置安全围栏装置,在每个托盘出入口设置安全门,并安装安全门锁,安全门大小须确保托盘进出方便。当其中一个托盘码放完成时,人工打开此托盘位置的安全门,将满托盘移出,并更换空托盘。若托盘没有码放完成,此时操作人员打开此托盘位置的安全门,则系统报警,机器人停止工作,以确保安全。若更换空托盘后,安全门没有关闭,则机器人不对此工位托盘进行码垛,并且系统发出报警提示。
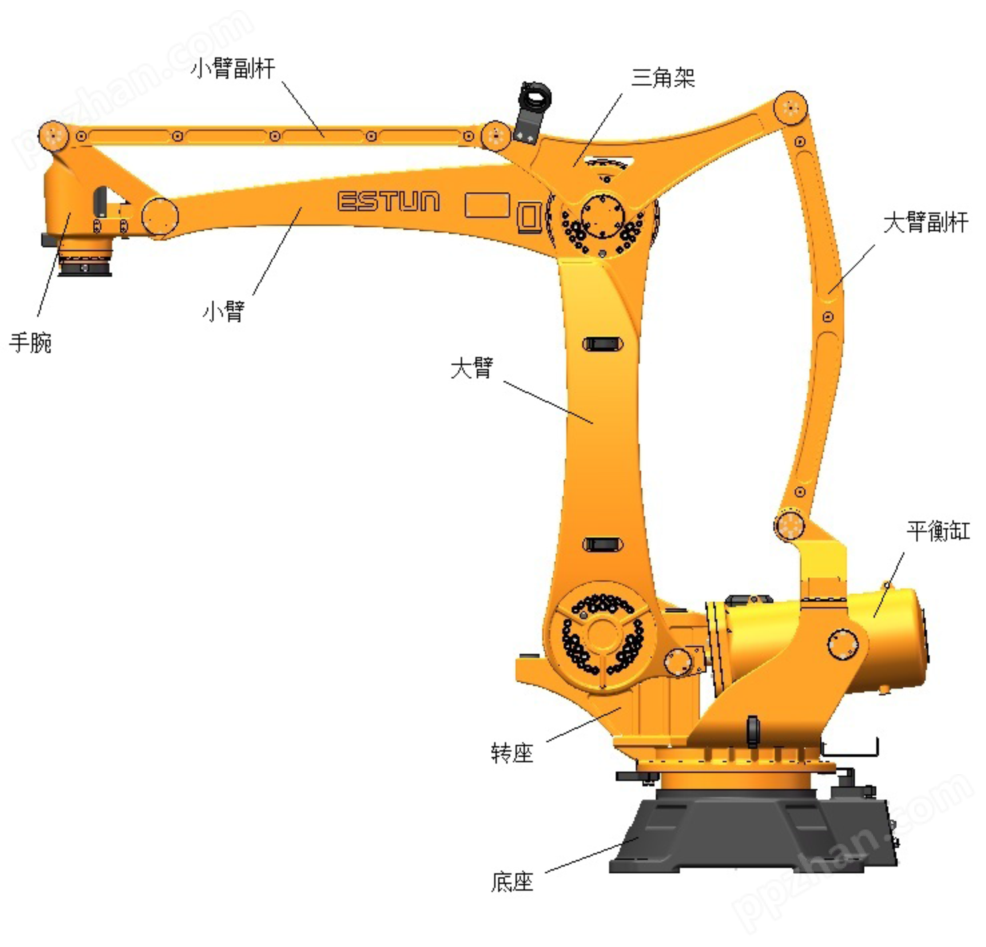
二、各设备说明 1. ER180码垛机器人
1.1码垛机器人外观 
图2 ER180码垛机器人外观图
1.2码垛机器人技术参数 | 型号 | ER180 |
| 动作类型 | 多关节型 |
| 控制轴数 | 4 |
| 放置方式 | 地 装/支架 |
| 速度 | J1轴 | 114°/sec |
| J2轴 | 108°/sec |
| J3轴 | 119°/sec |
| J4轴 | 290°/sec |
| 工作范围 | J1轴 | ±180° |
| J2轴 | -40°~ +90° |
| J3轴 | -80°~ +68° |
| J4轴 | ±360° |
| 工作半径 | 3200mm |
| 机器人本体总重量 | 1400Kg |
| 负载 | 180Kg |
| 重复定位精度 | ±0.4mm |
| 防护等级 | IP65 |
1.3码垛机器人结构 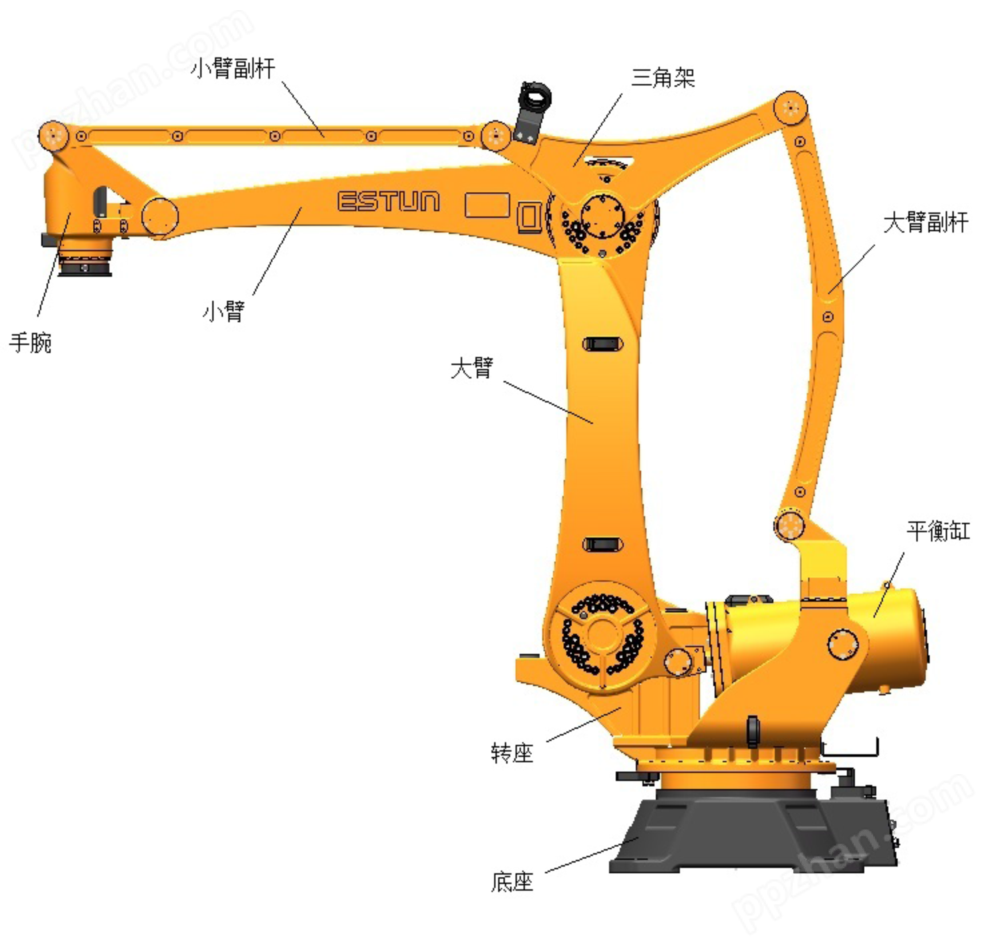
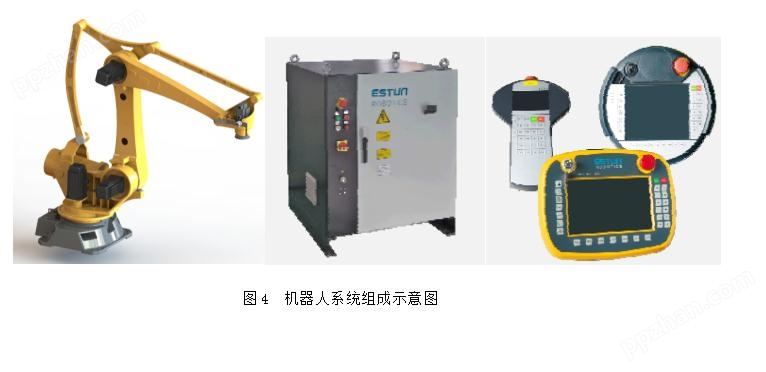
图3 ER180码垛机器人结构图 1.4机器人系统组成 机器人系统由机器人、控制柜、示教器、电缆等组成。
机器人电控系统集成在机器人控制柜内,机器人的运动是通过控制器和驱动器来控制伺服电机的转动从而实现机器人各关节的联动。
机器人控制柜面板设有主电源开关、电源指示灯、启动按钮、停止按钮、状态按钮、报警指示灯、手动/自动切换按钮、急停按钮。通过电柜面板和示教盒实现对机器人的操作。
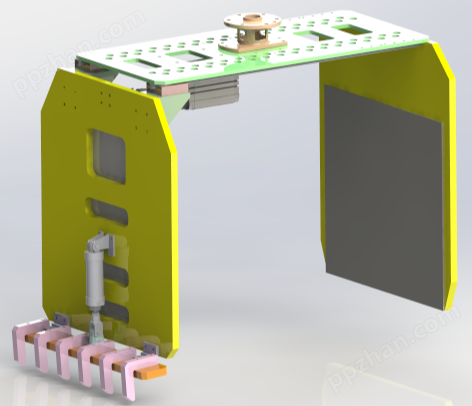
 2.机器人抓具(非标定制) 2.1 抓具结构
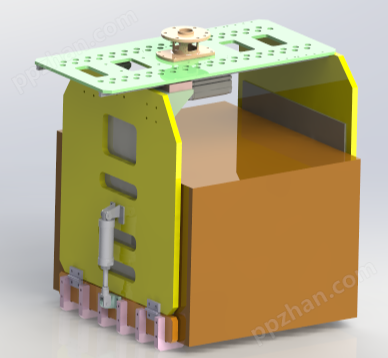
2.机器人抓具(非标定制) 2.1 抓具结构 机器人抓具采用夹板式抓具结构,一侧夹板固定,一侧夹板为移动式结构,采用气缸驱动夹板在直线导轨上移动,实现抓具的夹紧与打开。移动侧夹板上设置活动抓齿结构,由气缸驱动,可对箱体底部进行托举。抓具工作过程稳定可靠,不掉件,不会对纸箱外观产生影响。

图5 机器人抓具结构示意图(打开状态)
图6 机器人抓具结构示意图(抓取时状态)
2.2 技术参数
| 抓具结构 | 夹板式 |
| 与机器人连接方式 | 法兰连接 |
| 开合行程(mm) | 300 |
| 驱动方式 | 气缸驱动 |
| 品牌配置 | SMC |
| 适用纸箱规格(mm) | 详见用户包装尺寸表 |
3.机器人底座 机器人安装底座采用优质碳钢材料与高强度型材焊接加工而成,结构稳定、强度可靠,底座表面喷漆处理。机器人底座与机器人之间采用高强度螺栓连接,底座与地基采用化学螺栓连接。
图7 机器人底座外形图
4.安全围栏装置 在机器人工作区域外围设置安全围栏装置,在每个托盘出入口设置安全门,并安装安全门锁。安全围栏装置由护网、安全门、立柱、安全门锁等组成,护网采用网格式安全护网,表面喷塑亮黄色警示色,护网高度2m,各出入口均配备急停开关装置和相对应的复位装置。
图8 安全门锁外观图
5. 机器人维护政策 保养时间以机器人每3年、或累计运转时间每达11,520小时的较短一方为周期进行更换油脂、油液。
山东晟隆智能设备有限公司致力为客户提供自动化包装整体解决方案!欢迎来电详询















