品牌
其他厂商性质
所在地
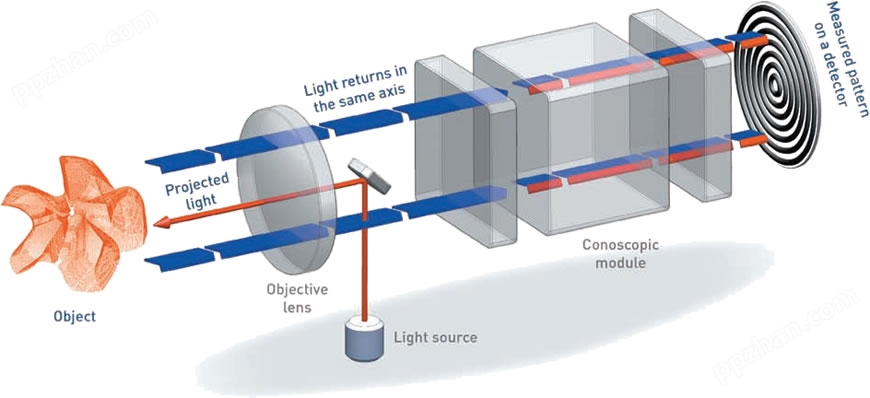
锥光全息测距是利用反射物体的偏振特性的一种技术。该技术的核心是一种各向异性晶体:穿过晶体的光线分裂相同路径但正交偏振的两部分。晶体的各向异性结构迫使每一个偏振光以不同的速度传播,从而在它们之间产生相位差。这种相位差能随被测物体的距离变化而形成干涉图样。
它是如何工作的?
传感器产生激光光束投射到被测物体上,所有的反射光线通过物镜收集进入锥光模块对产生的干涉图样进行分析,以确定物体的距离。
产品优势
该传感器采用了技术---锥光偏振全息技术,此技术相较于各种工业应用的标准距离测量方法明显更具优势,超过标准的距离测量方法用于各种工业应用中的优势。此传感器无运动部件所以产品的稳定和精度更好。相较于标准三角测量法,我们的技术在测量系统中有很大的优势。两个主要优点如下:
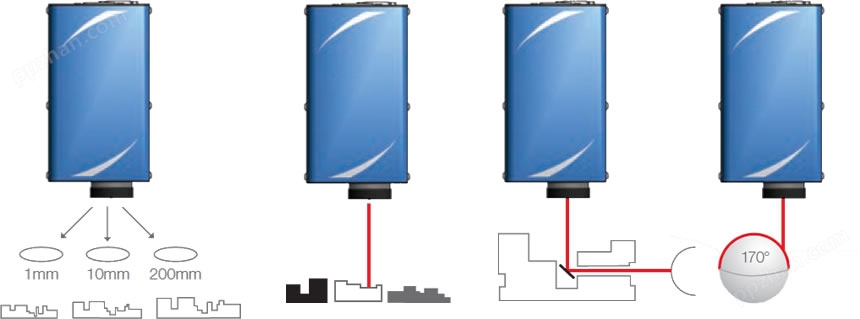
共线性:此传感器输出的激光束与反射信号同轴。利用这种共线性传感器可通过折叠光学和可测角度范围为空间170°(±85°)来测量内孔。结合中继光学的能力使传感器可以在激光焊接/切割应用和机器视觉应用相同的聚焦透镜。
低电子噪声依赖性:整个检测器用于评估单个空间频率,使测量具有高噪声弹性。此外,如果某些光被阻挡,其他区域可以提供足够的测量信号。
高分辩率及重复性
在一个较大的工作范围内,传感器可以保持较高的分辨率和重复性。
用途广泛性能稳定
传感器受被测物体的材质和表面特性影响小,不需喷涂显像粉即可对不同材质的高反射、漫反射及粗糙表面进行直接测量。(极少数特殊材质除外)
孔及复杂几何表面的测量
得益于传感器的同轴性,可对深孔,狭窄插槽、凹槽及盲孔进行高精度测量。
大范围可测角度
我们的激光传感器的可测角度范围为空间170°(±85°),这一技术使得传感器可以真实还原被测物体的复杂表面的每一个微小细节,且不会对被测物体造成任何损坏。
STOPM-CP-11 智能传感器是我们的非接触式激光位移传感器家族的个传感器。新的智能技术包含一组丰富的计算程序,使集成变得容易,并提供通过/失败的结果,而不是简单的置换值。
STOPM-CP-11智能传感器保留了我们所有的优势,其测量速度为10000点/秒。这种新的传感器允许快速二维轮廓测量、分析和特征评估。内置智能技术还提供了一个独立的传感器,可直接连网而无需在客户的主机上安装软件。

特性
可测量复杂的几何形状和可覆盖角度范围为空间170°(±85°)
使用内置的特征库来进行轮廓分析(如:距离、高度、角度、半径等)
Go/No Go指令输出结果
可直接连网,无需安装软件
外部触发,数字输入/输出
内置平滑点阵列滤波器
可配置编码器输入和脉位转换
测量内孔的共线技术
采用自动曝光装置自动补偿材料的多种变化
物镜可从16mm-250mm互换
测量速度高达10000分/秒
产品规格
标准物镜
| 物镜类型 | 16 | 25 | 25G | 40 | 50 | 75 | 100 | 150 | 200 | 250 |
| 型号 | 3Z83016 | 3Z83025 | 3Z81030 | 3Z83040 | 3Z81050 | 3Z81075 | 3Z81100 | 3Z81006 | 3Z82007 | 3Z82008 |
| 测量范围 mm | 0.6 | 1.8 | 1.8 | 4 | 8 | 18 | 35 | 70 | 125 | 180 |
| 支架/底部 mm | 9.5 | 14 | 18 | 43.5 | 44 | 70 | 95 | 145 | 200 | 250 |
| 精度 μm | 2 | 3 | 3 | 4 | 6 | 10 | 15 | 35 | 70 | 100 |
| 直线性 ±% | 0.33 | 0.17 | 0.17 | 0.1 | 0.08 | 0.06 | 0.05 | 0.05 | 0.06 | 0.06 |
| 重复性(动态)μm | 0.15 | 0.4 | 0.4 | 0.6 | 1 | 2 | 4 | 15 | 25 | 35 |
| X激光光斑大小 μm | 20 | 27 | 27 | 34 | 37 | 47 | 63 | 85 | 105 | 126 |
| 覆盖范围 ° | 150 | 150 | 150 | 150 | 170 | 170 | 170 | 170 | 170 | 170 |
传感器
| 用户界面 | Web based, doesn’t require software installation |
| 支持平台 | WindowsiOSAndroid with Google Chrome Web Browser (version 55.x.x.x or higher) |
| 轮廓触发器 | External TriggerPositionDirectionTime |
| 编码器 | Configurable encoder input and pulse to position conversion |
| 分析 | Profile Analysis with GoNo Go result |
| 剖面尺寸 Points | 90,000 |
| 支持锚 | 14 |
| 支持特性 | 27 |
| 剖面特性 | 8 |
| 数字输出 TTLLVTTL | Multiple digital outputs over single wire with configurable pulse length |
| 工作储存 | 1000 jobs |
| 报告 | Evaluation results, filtering by date and by job |
| 工作管理 | ImportExport Jobs |
| 单位 | MetricImperial units, DegreesRadians |
传感器
| 测量频率 Hz | Up to 10,000 |
| 尺寸(无物镜) mm | 140 x 79 x 57 |
| 重量 gr | 700 |
接口
| 通迅 | Ethernet 10/100 UDP with SDK, HTTP with Google Chrome |
| 软件开发包 | C, C++, C#, Labview |
模拟信号 (可选项)
| 边界范围 V | ±4.5± 0.004 |
| 线性模拟(9) % | ±0.1 |
光源
| 类型 | Red laser |
| 激光安全等级 | Class 2, IEC 60825-1:2007 complies with 21 CFR 1040.10 and 1040.11Laser Notice No.50 |
电气
| 供电电压 | 12 VDC±10% 110-220 VAC 50/60Hz |
同步性
| 输入触发 TTLLVTTL | 5.3V |
| 编码器 | Up to 2 differential quadratore encoders |
环境
| 操作温度 ºC | ºC |
| 温度依赖性(10) F.S./ºC | ≤0.03% |
| 环境光 lx | Up to 15,000 |
点此查看产品尺寸,GUI智能传感器,锚和特性
STOPM-CP-20传感器是我们的非接触式激光位移传感器家族的的传感器。此传感器是基于专有的锥光全息技术的三维测距的非接触式光学传感器。STOPM-CP-20测距单点速度可达20000点/秒到精度达到亚微米级。

特性
STOPM-CP-20可提供多种物镜,可测量不同精度、分辨率
传感器头部直接处理所有数据
STOPM- CP-20支持外部和内部触发的操作模式
通过标准以太网实现与PC机链接/通信
通过DLL来软件集成不需要其它任何的驱动程序/设置
测量速率高达20000Hz
短聚焦目标物体精度可达亚微米
模拟输出(可选)
自动曝光模式,能够在不改变激光功率的情况下实时测量高和低反射表面
可测量复杂的几何形状和可覆盖角度范围为空间170°(±85°)
中继光学的集成能力
传感器可以充当主同步器,也可以作为系动的随动同步。
OPS(OPM位置同步),可记录编码器输出,精确位置同步等三轴同步的测量能力。
产品特性
标准物镜
| 物镜类型 | 16 | 25 | 25G | 40 | 50 | 75 | 100 | 150 | 200 | 250 |
| 型号 | 3Z83016 | 3Z83025 | 3Z81030 | 3Z83040 | 3Z81050 | 3Z81075 | 3Z81100 | 3Z82006 | 3Z82007 | 3Z82008 |
| 测量范围 mm | 0.6 | 1.8 | 1.8 | 4 | 8 | 18 | 35 | 70 | 125 | 180 |
| 对峙/支架底部 mm | 9.5 | 14 | 18 | 43.5 | 44 | 70 | 95 | 145 | 200 | 250 |
| 精度 μm | 2 | 3 | 3 | 4 | 6 | 10 | 15 | 35 | 70 | 100 |
| 直线性 ±% | 0.33 | 0.17 | 0.17 | 0.1 | 0.08 | 0.06 | 0.05 | 0.05 | 0.06 | 0.06 |
| 重复性(动态)μm | 0.15 | 0.4 | 0.4 | 0.6 | 1 | 2 | 4 | 15 | 25 | 35 |
| X激光光斑大小 μm | 20 | 27 | 27 | 34 | 37 | 47 | 63 | 85 | 105 | 126 |
| 覆盖范围 ° | 150 | 150 | 150 | 150 | 170 | 170 | 170 | 170 | 170 | 170 |
传感器
| 测量频率 Hz | Up to 20,000 |
| 尺寸(无物镜) mm | 140 x 79 x 57 |
| 重量 gr | 700 |
接口
| 通迅 | Ethernet 10/100 UDP |
| 软件开发包 | C, C++, C#, Labview |
模拟信号 (可选项)
| 边界范围 V | ±4.5 ±0.004 |
| 线性模拟(9) % | ±0.1 |
光源
| 类型 | Red laser |
| 激光安全等级 | Class 3R, IEC60825-1:2014 complies with 21CFR and 1040.11 Laser Notice No.50 |
电气
| 供电电压 | 12 VDC±10% 65-265 VAC 50/60Hz |
同步性
| 输入触发 TTL/LVTTL | 5/3.3V |
| 输出选通 TTL | 5V |
环境
| 操作温度 ºC | 18 to 45 |
| 温度依赖性(10) F.S./ºC | ≤0.03% |
| 环境光 lx | Up to 15,000 *Preliminary |
点此查看产品尺寸和测量范围
STOPM-CP-10HD是我们的高精度二维剖面和三维测量点激光位移传感器,工作速度高达10000 Hz,STOPM-CP-10HD包括有自动曝光功能,能实时调整改变表面反射率(黑色,白色和吸收性等材料),相较于STOPM-CP-10,STOPM-CP-10HD更适用于以下情况:

当需要更高的精度时。注意是基于STOPM-cp-10相同支架的情况下
较高的精度以牺牲测量范围为代价的。
测量有光泽的金属表面
需要更高的横向分辨率
特性:
亚微米精密测量
可测量复杂的几何形状可覆盖角度范围为空间170°(±85°)
测量盲孔的共线技术
采用自动曝光补偿多种材料的变化
物镜可从16mm-250mm互换
测量速度高达10000点/秒
高清物镜
| 物镜类型 | 16H | 25H | 25GH | 40H | 50H |
| 型号 | 3Z84016 | 3Z81025 | 3Z81030 | 3Z83040 | 3Z81050T |
| 测量范围 mm | 0.2 | 0.6 | 0.6 | 1.4 | 2 |
| 支架/底部 mm | 9.7 | 14.5 | 18.25 | 44.5 | 42 |
| 精度 μm | 0.5 | 1 | 1 | 2 | 2.5 |
| 直线性 ±% | 0.25 | 0.17 | 0.17 | 0.14 | 0.13 |
| 重复性(动态)μm | 0.1 | 0.2 | 0.2 | 0.4 | 0.5 |
| X激光光斑大小 μm | 7 | 12 | 12 | 10 | 19 |
| 覆盖范围 ° | 150 | 150 | 150 | 150 | 150 |
传感器
| 测量频率 Hz | Up to 10,000 |
| 尺寸(无物镜) mm | 140 x 79 x 57 |
| 重量 gr | 700 |
接口
| 通迅 | Ethernet 10/100 UDP |
| 软件开发包 | C, C++, C#, Labview |
模拟信号(可选项)
| 边界范围 V | ±4.5 ± 0.004 |
| 线性模拟(9) % | ±0.1 |
光源
| 类型 | Red laser |
| 激光安全等级 | Class 2, IEC 60825-1:2007 complies with 21CFR 1040.10 and 1040.11 Laser Notice No.50 |
电气
| 供电电压 | 12 VDC±10% 65-265 VAC 50/60Hz |
同步性
| 输入触发 TTL/LVTTL | 5/3.3V |
| 输出选通 TTL | 5V |
环境
| 操作温度 ºC | 18 to 45 |
| 温度依赖性(10) F.S./ºC | ≤0.03% |
| 环境光 lx | Up to 15,000 |
点此查看产品尺寸和测量范围

STOPM-CP-3是一个强大的2D剖面和3D扫描的远程高精度测量的光学传感器。基于锥光全息技术,STOPM-CP-3是具有广泛的覆盖对象的共线传感器,可使用16-250mm的物镜。广泛应用于工业生产。
特性:
可测量复杂的几何形状可覆盖角度范围为空间170°(±85°)
测量盲孔的共线技术
过程检验
物镜可从16mm-250mm互换
产品性能
标准物镜
| 物镜类型 | 16 | 25 | 25G | 40 | 50 | 75 | 100 | 150 | 200 | 250 |
| 型号 | 3Z83016 | 3Z83025 | 3Z81030 | 3Z83040 | 3Z81050 | 3Z81075 | 3Z81100 | 3Z82006 | 3Z82007 | 3Z82008 |
| 测量范围 mm | 0.6 | 1.8 | 1.8 | 4 | 8 | 18 | 35 | 70 | 125 | 180 |
| 支架/底部 mm | 9.5 | 14 | 18 | 43.5 | 44 | 70 | 95 | 145 | 200 | 250 |
| 直线性 ±% | 0.33 | 0.17 | 0.17 | 0.1 | 0.08 | 0.06 | 0.05 | 0.05 | 0.06 | 0.06 |
| 重复性(动态) μm | 0.02 | 0.06 | 0.06 | 0.04 | 0.10 | 0.30 | 0.50 | 2.50 | 3 | 6 |
| X激光光斑大小 μm | 20 | 27 | 27 | 34 | 37 | 47 | 63 | 85 | 105 | 126 |
| 覆盖范围 ° | 150 | 150 | 150 | 150 | 170 | 170 | 170 | 170 | 170 | 170 |
特殊物镜
| 扩展 | |||
| 物镜类型 | 50E | 75E | 125E |
| 型号 | 3Z83050E | 3Z83075E | 3Z83125E |
| 测量范围 | 8 | 18 | 45 |
| 对峙/支架底部 | 85 | 145 | 240 |
| 直线性 | 0.08 | 0.06 | 0.064 |
| 重复性(动态) | 0.1 | 0.1 | 0.05 |
| X激光光斑大小 | 63 | 85 | 126 |
| 覆盖范围 | 170 | 170 | 170 |
传感器
| 测量频率 Hz | Up to 3,000 |
| 尺寸(无物镜) mm | 140x79x57 |
| 重量 gr | 700 |
接口
| 通迅 | Ethernet 10/100 /1000 UDP |
| 软件开发包 | C, C++, C#, Labview |
模似信号(可选项)
| 边界范围 | ±4.5 V ± 0.004 V |
| 线性模拟(9) | ±0.1% |
光源
| 类型 | Red Laser |
| 激光安全等级 | Class 2, IEC 60825-1:2007 complies with 31CFR 1040.10 and 1040.11 class II - FDA |
电气
| 供电电压 | 12 VDC±10% 65-265 VAC 50/60Hz |
同步性
| 输入触发 TTL/LVTTL | 5/3.3V |
| 输出选通 TTL | 5V |
环境
| 操作温度 ºC | 18 to 45 |
| 温度依赖性(10) F.S./ºC | ±0.1% |
| 环境光 lx | Up to 15,000 |
点此查看产品尺寸
STOPM-CP-3R是我们的非接触式的高精度二维剖面和三维表面扫描的点激光位移传感器,CP-3R 适用于扫描透明材料如玻璃,液体,和镜面材料如镜片,晶片。
STOPM-CP-3R也可以测量厚玻璃和透明涂层的表面可同时读取顶部和底部的反射。
STOPM-CP-3R在使用可互换的物镜和1um横向分辨率下可达到亚微米深度分辨率。

特性:
高精度和可重复性
光斑尺寸小于5μm
共线过程检测点传感器
灵活的测量范围
实际测量速率高达3000点/秒
多达3轴系统同步可选
可用于工业环境
详细的应用程序接口 (API )手册和带有硬件仿真程序的软件开发工具包(SKD)
产品性能
标准物镜
| 物镜类型 | 25N | 50N | 75N |
| 型号 | 3Z79030 | 3Z79050 | 3Z79075 |
| 测量范围 mm | 1 | 5 | 9 |
| 对峙/支架底部 mm | 16 | 40 | 65 |
| 精度 μm | 1 | 2.5 | 4.5 |
| 物理厚度范围 mm | 0.3-1 | 1.5-5 | 2.7-9 |
| 直线性 ±% | 0.1 | 0.05 | 0.05 |
| X激光光斑大小 μm | 5 | 16 | 25 |
| 覆盖范围 ° | 5 | 3 | 1.5 |
感应器
| 测量频率 Hz | Up to 3,000 |
| 尺寸(无物镜) mm | 140 x 79 x 57 |
| 重量 gr | 700 |
接口
| 通讯 | Ethernet 10/100 UDP |
| 软件开发包 | C, C++, C#, Labview |
模似信号(可选项)
| 边界范围 V | ±4.5 ± 0.004 |
| 线性模拟(9) % | ±0.1 |
光源
| 类型 | Red laser |
| 激光安全等级 | Class 2, IEC 60825-1:2007 complies with 21CFR 1040.10 and 1040.11 Laser Notice No.50 |
电气
| 供电电压 | 12 VDC±10% 65-265 VAC 50/60Hz |
同步性
| 输入触发 TTL/LVTTL | 5/3.3V |
| 输出选通 TTL | 5V |
环境
| 操作温度 ºC | 18 to 45 |
| 温度依赖性(10) F.S./ºC | ≤0.03% |
| 环境光 lx | Up to 15,000 |
点此查看产品尺寸和测量范围
STOPM-Mini CP-9R是我们新一代的镜面表面和反射的点激光位移传感器。它具有体积小、重量轻的特点。是用于镜面和透明材料的真实轮廓测量和三维扫描的的传感器。并且非常适用于过程质检和玻璃划痕其速分析速度高达9000Hz。
STOPM-Mini CP-9R可以同时通过表面反射获取厚玻璃和透明涂层的顶部和底部的测量。
单独的控制盒和传感器设计,使传感器可放置在的位置和重量较轻的三坐标测量机上。控制单元与传感器分离,使传感器可方便的放置在需要的位置和重量较轻的三坐标测量机上。

性能:
重量轻,占地面积小
高精度和可重复性低于1μm
实际测量速率高达9000点/秒
内置质量参数允许高效过滤
光斑尺寸小于3μm
25mm物镜
易于安装,易于操作的控制传感器的参数和范围指标的软件
产品性能:
标准物镜
| 物镜类型 | 25 |
| 型号 | 3Z79025 |
| 测量范围 mm | 1 |
| 对峙/支架底部 mm | 16 |
| 精度 μm | 0.6 |
| 直线性 ±% | 0.06 |
| X激光光斑大小 μm | 3 |
| 覆盖范围 ° | 6 |
传感器
| 测量频率 Hz | 9,000 |
| 尺寸(无物镜) mm | 91x 65 x 33 |
| 重量 gr | 390 |
| 连接线长度 m | Pigtailed 0.5m, optional 5/20m |
| 指示器 | Green LED – On when sensor's power is on |
| 标准 | Vibration (IEC 600068-2-6), Shock(IEC 600068-2-7) |
光源
| 类型 | Red laser |
| 激光安全等级 | Class 2, IEC 60825-1:2007 complies with 21CFR 1040.10 and 1040.11 Laser Notice No.50 |
环境
| 操作温度 °C | 18 to 35 |
| 温度依赖性(10) F.S./ºC | ≤0.03% |
| 环境光 lx | Up to 15,000 |
控制盒
| 尺寸(长*宽*高) mm | 105 x167x 54 |
| 重量 gr | 630 |
| 控制信号 | ROG – output, External trigger – input, Analog output (optional) ±4.5 V, OPS (Position Synchronization),+5V output (100mA) |
| 电压 V | 24 ±10% (0.5A) |
| 指示器 | Connect: Green LED – On when sensor head connected; Power : Green LED – On when power is on |
| 通信 | Ethernet 10/100 UDP |
| 软件开发工具 | C, C++, C#, Labview |

STOPM-CL-100是基于的锥光全息技术的三维测量的非接触式的光学传感器。
STOPM-CL-100内含有一个高达20000点/秒的测量速度的CP-20新传感器和一个每秒旋转100行的镜片。
STOPM-CL-100在微米精度下调线长度可达18mm。控制镜片的位置使其可清晰观察到角度范围±110°的削弱角覆盖和陡沟侧壁等。
性能
可调整的线长度,允许不同的横向分辨率和扫描速度
多达100行/秒
调整线角度可扫描和覆盖削弱角,陡沟和侧壁等
角覆盖率为110°
高达20000Hz的测量速度
支持外部和内部触发操作模式
通过标准以太网实现与PC机的通信
与DLL进行简单的软件集成,无需安装额外的驱动程序
自动曝光模式,能够实时测量顶部和高和低反射表面
不用改变激光功率
垂直Z轴
| 测量范围 mm | 30 |
| 对峙/支架底部 mm | 50 |
| 精度 μm | 20 |
| 直线性 ±% | 0.05 |
| 重复性(动态) μm | 6 |
| 覆盖范围 ° | 170 |
线性能
| 线/秒 | 100 |
| 线跨度 ° | 10 |
| 线长@近范围 mm | 13 |
| 线长@ 中心范围 mm | 15.5 |
| 线长@远范围 mm | 18 |
| 线分辨率@中距离线宽(X方向)@中心范围 mm | 0.09 |
| 可调线角度 μm | 47 |
| 线宽(X方向)@中心范围 ° | -30, -25, -20,-15, -10, -5, 0, +5, +10,+15, +20, +25, +30 |
| 角度覆盖(X) ° | 220 |
传感器
| 测量频率 Hz | Up to 20,000 |
| 尺寸(无物镜) mm | 260 X 110 X 65 |
| 重量 gr | 2100 |
接口
| 通讯 | Ethernet 10/100 UDP |
| 软件开发包 | C, C++, C#, Labview |
光源
| 类型 | Red laser |
| 激光安全等级 | Class 3R, IEC60825-1:2014 complies with 21CFR and 1040.11 Laser Notice No.50 |
电气
| 供电电压 | 24 VDC±10% 65-265 VAC 50/60Hz |
同步性
| 输入触发 TTL/VTTL | 5/3.3V |
| 输出选通 TTL | 5V |
环境
| 操作温度 ºC | 18 to 45 |
| 温度依赖性(10) F.S./ºC | ≤0.03% |
| 环境光 lx | Up to 15,000 |
硬件
| 硬件模式 | High,low,Pulse |
| 硬件数字触发器 | 5-24V |

潜望镜这个配件是专为克服一些有基本的限制的陡峭的角度的孔和管子内部结构的直径测量而设计的。
潜望镜是由常规的75mm透镜集成从而能够从传感器的标准方同垂直测量。它的优势在于可用于CP传感器难以测量到的其他区域精确测量。
性能:
与标准传感器方向呈90°度检查
可用75mm的镜头,其他镜头可根据要求定制
潜望镜可以旋转180°达到用户理想的测量方向
集合了常规CP传感器的所有优点和性能
角覆盖度为150°
伸缩接头设计,防止轴向损坏
产品性能
| 附件型 | Periscope for 75mm lens |
| 型号 | 3Z80510 |
| 测量范围 mm | 9.5 |
| 对峙/支架底部 mm | 0.5 |
| 精度 μm | 10 |
| 直线性 ±% | 0.15 |
| 重复性(动态)μm | 3 |
| X激光光斑大小 μm | 47 |
| 覆盖范围 ° | 150 |
| 主要性能 | |
| 潜望镜重量 gr | 120 |
| 深度范围 | |
| 渗透 mm | 15 |
| 孔径 mm | 6 |
参数说明:
测量范围:传感器的有效范围
对峙:从物镜的顶端到测量中心的距离。
精度:与标称值相比测量的两个平面之间的差异
线性:测量范围与其标称距离在测量范围上的偏差
重现性(动态):两个平面之间的测量50次的STD平均值。
重复性(静态):平面上10000种静态测量方法的标准偏差
x激光光斑尺寸:在对峙位置测量半峰全宽值(FWHM)
角覆盖:在定义角度为一半的参考平面上进行测试。
模拟线性:在测量范围内输出电压与其标称距离之间的偏差
温度依赖性:相对范围在18-28˚C测量,距离值减小。
随着温度的升高
允许的环境光:用靠近传感器目标表面的白炽光源进行测试。
我们提供不同的软件平台,使传感器集成更容易。软件开发工具包可兼容Windows 7,Windows 8.1和 Windows 10操作系统。SDK基于32/64位编写。SDK可成功的集成到以下编程和开发的系统中:
C,C++,C #
LabVIEW 8.6或更高版本
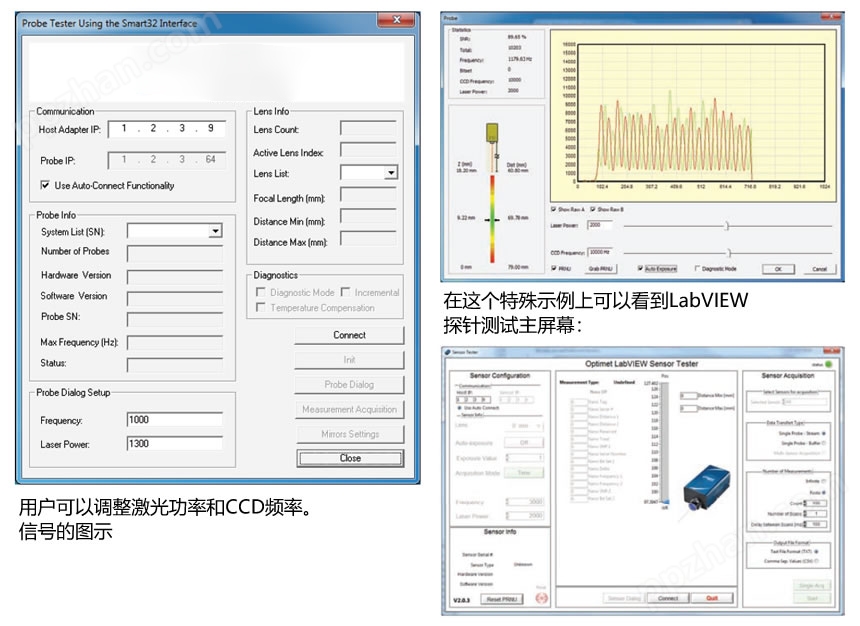
我们同时也提供用于初始化传感器设置的智能探针测试仪GUI:
工具包
软件工具包包括一个完整的应用程序包,用于配置和维护CP和CL-100型传感器。包括以下工具:
镜头编辑器-添加和删除传感器物镜的应用程序
传感分析仪–可应用于查看CL-100型传感器的实时输出
传感器配置–有助于传感器与PLC轻松配置
工作转换器–从传感器转换扫描数据到OPM的工作文件
分析软件
浏览器软件是一个提供我们产品内置模式分析的简易操作软件。此软件可允许数字可视化的扫描和启用计量分析的性能。其采集的数据可输出到其他软件程序中进行分析或数控加工。
此软件提供
线段的斜率和角度的数据
段之间的距离数据—距离的测量数据
在同一轮廓不同部分之间,包括垂直、水平和距离
圆形半径的数据-定义并测量扫描区域的圆半径。
粗糙度分析-测量表面粗糙度。
找出球体中心 –找出球体中心的坐标位置。
过滤-通过平滑或消除轮廓扫描中的坏点来提高精度。
轮廓比较-可以比较两个轮廓。
圆拟合分析-提供提供轮廓中任意点之间的径向距离和轮廓中的圆形段的数据
线性度和圆度分析-提供关于给定轮廓线的线性度或圆度的信息
有效半径——根据轮廓和两条切线约束的面积计算有效半径
自动化和宏-允许在宏中自动重复配置文件分析过程。
表面形貌可视化分析软件
“Truemap”是用于观察我们传感器的测量结果,对获得的数据进行深入的分析。“Truemap”提供了多种分析工具包括滤波器、拟合、拆模,和许多其他可视化选项,如动态尺和剖面部分的实时三维图形环境。
我们的工程师,与TrueGage共同为客户开发优化了TRUEMAP提供了一个的完整分析软件。
TrueMap是由TrueGageR提供和支持。用户可以在联系我们下载TrueMap14天试用版试用。
为了获得更好的剖面分析数据,Truemap 数据同样可用于TrueSurf。OPM为了完成测量过程为客户提供多种分析能力和的数据显示的软件。
用户对于找到更高精度、速度和准确度来改进过程检测测量的解决方案的需求越来越多,以便能优化产品和降低制造成本。我们的创新传感器克服许多现有的测量设备的局限性,在许多情况下为复杂的测量问题提供了全面的解决方案。
我们提供多种多样的传感器配置,解决了测量多种材料表面的相关要求。具有各种各样的传感器配置,解决了大量的计量测量多种材料表面的相关要求。为了选择合适的传感器配置,用户必须识别所涉及的材料,以及它的表面特性。更确切地说,要考虑清楚到底是物质扩散还是反射?透明还是半透明?因为每种材料都有其自身的物理和光学特性。其他需要考虑的因素还有物体的距离,传感器的测量范围,当然还有特定应用所需要的精度等等。
此系列传感器产品最主要优点是传感器和物镜是分离设计的。每个传感器头可配换多种尺寸的镜头。这个优点使单个传感器覆盖了更大的测量范围(从传感器到测量中心的距离)和精确度。此外,具有实时控制和过滤的SNR(信噪比)和相对激光功率采集的信号提取的技术。这些的工艺特性以及共线的光学结构使其能与大多数已知的应用匹配。
该传感器的自动聚焦激光系统针对于传统的激光打标、焊接、钻孔和切割系统难以精确地将激光聚焦在物体表面上的难题提供了一个的解决方案。
将其集成到没有CAD的激光系统中可提高自动对焦的功能,有利于激光系统的设置,使测量更便捷。该专有的锥光全息技术还可用于激光系统的光路中。
此外,由于传感器的照明设计是准直的,所以透镜可以远离传感器,因为测量是通过激光系统本身的物镜进行的。我们现有一些客户已经成功地将传感器集成到离物镜两米位置。
保持焦点:不管物体的表面形状都可以高速的不间断提取距离数据来保持系统焦点。
更快:其高测量速度使激光系统运行速度比任何其他系统配置都更快。
更准:在激光打标系统中使用实时可调焦距可以确保精准的色差。
可调:从低反(0.3%)的黑色表面到高反(99%)的白色表面都可自动调曝光调节。
雕刻机的作用在于使用硬钢刀具在物体表面完成雕刻设计。使用我们的非接触式距离传感器可让客户准确的测量出雕刻区域的深度。由于其广角度覆盖范围使其能够测量到其他传感器不能测量到区域。
划痕的检测在手机和显示屏行业的应用中至关重要。划痕特性如深度和宽度决定了屏幕是否可以按照特定标准来进行翻新。带 25mm焦距的物镜OPM CP-3R或MINI CP-9R非常适用于对显示屏的外表面的划痕进行扫描和分析。OPM对于这种类型的市场应用非常熟悉特别是中国和韩国的手机生产商已经广泛应用于在手机制造过程检测中。
在橡胶制造行业尤其是轮胎行业的应用中,模具的检验和质量控制是重要的。这是一个具有挑战性的领域,因为其要求高精度长距离和大范围的检测。在检测过程中可检索到的数据包括每一环节的高度、宽度、角度和粗糙度。OPM CP-10匹配50mm镜头能够逐一扫描来确定这些参数,并且相交于用CAD-CAM或类似于CAD的软件的原始绘图质量更有保证。
相较于Freeform /CAD模型与由高精度传感器测量的实际尺寸进行比对,这是一项非常复杂的任务。在各种工业应用中,如铸造、锻造、焊接和金属板成形等方面,这种比对通常集中在研发、制造和QC过程中。CAD比对过程通常是用涡轮叶片和航空/航天部件,汽车发动机主体结构及传动部件等广泛工业应用上。在模具制造领域中,比对能力是非常重要的,因为这些产品的质量和准确度是以原模具的精度为基础的。通过扫描模具并与原CAD进行比对,可以确定模具是按规格生产的。可以通过使用一些标准的软件包来进行CAD比对。
计量模型在色卡上显示标称值和实际值之差。
可以在传感器头里安装一个潜望镜。利用OPM的共线技术,扫描内深孔或附件获得内部的深度、直径和角度等。这种特殊性能对于测量发动机内孔和各种类型的管道的内部结构非常重要。
轮胎表面检测工业上对非接触式遥感传感在有很大需求。通过使用点激光传感器连续扫描轮胎表面来完成这项检测。轮胎旋转时,每平行旋转于旋转轴一次,光束位置随之递增。
轮胎表面评估/检测的两个主要标准/要求:
质量检验:通过测量和质量控制过程确保在生产过程中轮轮胎凹槽部分和花纹深度是根据其设计规格制造的。
性能检测:对轮胎磨损率进行分析,对在不同行驶环境和行驶距离等来确定轮胎老化的程度。
轮胎的宽槽和凹槽都具有宽而深的特性,其陡峭的角度通常在75°以上。为了获得精确的角度测量,需要用到共线测量技术来确保信号源不受轮胎的花纹和侧壁等的干扰。
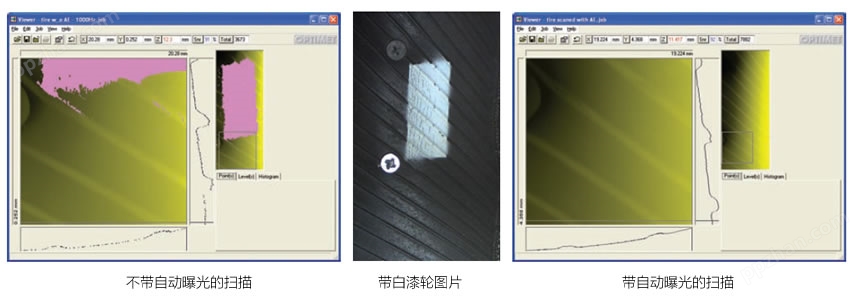
自动曝光是OPM传感器的又一个专有的特性,可以用来测量高反射表面,如下图所示。
粉红色信号(左)表示数据不足。