
品牌
其他厂商性质
所在地

近年来,由于工业制造技术不断日新月异,因此产品研发领域及质量检测领域的应用需求也日益成长,针对复杂曲面的非接触式三维量测技术也变得越来越重要。
一间开发光学量测系统的Steinbichler Optotechnik公司,基于在光学坐标量测多年的经验与专业而设计开发出COMET照相量测系统,并且持续地以客户为导向来发展。COMET身为光学量测界的性产品,目前用户已经遍布世界各地。
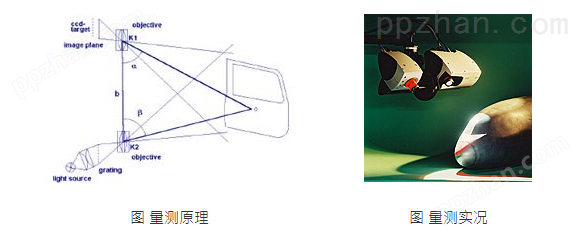
量测原理
COMET 5照相量测系统的物理学基础是局部三角形测量法,通过白光光源将一系列的格栅化光束投射到待测量的物体上,再用单镜头沿着光束方向将这些投射到物体表面上的格栅拍下来,通过数字式地移动格栅,投影的模式也会随之变化。因此,对每一个在镜头上获得的图片,都会分配有一个确定的编码。进而,对物体每一个点的三维位置,可以从目标镜头K1和K2之间的距离b及三角法中的角α和β计算得到。于是一个快速的且高精度的测量设备就此诞生。
崭新的数字投影技术可以满足高速的量测工作,1 - 2秒的数据撷取程序在容易震动的恶劣工厂环境下量测时,这无疑是一项优势。系统可以支持64位操作系统的PC计算机硬件,使得量测数据的输出处理工作能够极快地完成。
迭合方式
单镜头技术保证了的数据质量,对于复杂的表面几何形状(凹状,凸状,桥形等等)都没有困难,也就是在两个局部重迭的图片间不会出现同步错误,也没有阴影效果的误差。单镜头的原理如同开枪射击时使用单眼瞄准的概念,量测结果十分精准。对于数据的迭合方式,COMET提供了自动转盘迭合对位(选转自动对位),贴点迭合对位(大型对象只要重迭两个贴点即可自动对位),特征迭合对位(适合正反两面扫瞄对象,不用回补贴点的数据空洞)等方式。
机械结构
强大稳定性的机械结构与刚性的机身梁柱,都是采用经过FEM模拟计算分析考虑的设计,如同专为COMET5照相量测系统开发的光学技术,将是为了确保的量测精准度。此外,大功率的外部水银光源透过光学纤维传送的设计,所以热能造成的影响可以排除,可以进一步地增进系统温度的稳定。该系统因此确保了高精准度量测结果的高重现性。
只要几个步骤以及几分钟的时间,使用者就可以将各种系统(1.4 / 2 / 4 / 11百万点/每次取像)设定成一个全新的测量场,从50mm,100mm,200mm,400mm到800mm的取像范围,加上系统容易使用各种不同的三脚架进行架设,也不用考虑传统计算机配置的需求,该系统可以在标准的笔记本电脑上执行。因此非常适合到处移动使用。不论对象的尺寸大小或是位置,甚至是周遭的环境情形,用户可以很容易将系统运送到目前的量测地点并为现有的工作进行客制化处理。
位于照相量测系统与计算机之间的数据传送主要是由CAN bus与GigaBit 以太网络来执行处理。这将在工业环境下确保设备的可靠度。附加的自我诊断功能选项,可以确保照相量测系统的功能性。为了确保量测过程的效率,COMETplus 量测软件可以额外地透过选购的摇控工具(tablet PC, WLAN)来进行远程控制。
结合了经过验证的单镜头技术与研发出的数字投影技术,确保了高速的量测工作具有优质的数据质量。智能型的点群删减功能具有快速撷取并处理大笔点群且不会有数据损失的优势。STL的输出演算也能保持最完征特征。COMET5照相量测系统经过VDI 2634认证,且能够快速且精准地完成所有的量测工作,此外也很适合在生产线旁胜任质量管理工作。

系统规格
COMET5 1.4M
| 相机像素 | 1360 x 1024 |
| 测量体积mm³ |
|
| 3D点距 µm | 33 / 80 / 160 / 320 / 650 |
| 测量时间/秒 | 0.6 |
| 计算机 | 1 x Intel Xeon Quadcore, 12 GB |
| 传感器定位 | 三脚架或配有手动选择和倾斜轴的支架,机器人 |
| 自动化项目定位 | 旋转转台,机器人 |
COMET5 2M
| 相机像素 | 1600 x 1200 |
| 测量体积mm³ |
|
| 3D点距µm | - / 55 / 115 / 240 / 500 |
| 测量时间/秒 | 0.6 |
| 计算机 | 1 x Intel Xeon Quadcore, 12 GB |
| 传感器定位 | 三脚架或配有手动选择和倾斜轴的支架,机器人 |
| 自动化项目定位 | 旋转转台,机器人 |
COMET5 4M
| 相机像素 | 2048 x 2048 |
| 测量体积 mm³ |
|
| 3D点距µm |
|
| 测量时间/秒 | 0.8 |
| 计算机 | HighEnd Workstation: |
| 3D点距µm |
|
| 测量时间/秒 | 4.0 |












